
Introduction
A recent assessment of advances in robotics published by the
Packaging Machinery Manufacturers Institute (PMMI) attributed increased robotic
dexterity to the overall rise in robotics for manufacturers:
While the benefits of manpower reduction and increased
operating efficiency are enough to justify the use of robots in the
manufacturing line, the real growth in robotics is due to the advances in the
design of end-of-arm-tooling (EOAT) or the end effector.
(PMMI. “2014 Trends in Robotics Market Assessment.” PMMI, Reston
Virginia: 2014, p. 16.)
This increase is also true for those involved in primary and
secondary packaging processes, especially for packagers of pharmaceuticals,
diagnostics, and medical devices. Indeed, innovations in vacuum cups, pneumatic
grippers, etc., coupled with advances in mechanical design tools using 3-D
simulations of EOAT allow engineers to create ever more flexible and nimble
robotic tooling capable of handling multiple tasks. As an authorized robotics
system integrator for FANUC America, ESS engineers have designed hundreds of
robotic end effectors for a range of applications from assembling drug delivery
devices to machine infeeds, robotic carton and case loading, track & trace
inspection, and robotic palletizing. Each application requires a different
approach to the design of the robot EOAT.
Types of EOAT
Robotic end effector styles can be categorized as vacuum,
gripper, platen, or some combination, which can be referred to as hybrid EOAT.
Recent developments in “bean bag” soft robotic grippers offer variations on
these basic categories. Magnetic EOAT represent yet another category of end
effectors beginning to make headlines in automation. The application will
dictate which type of EOAT works best.
Vacuum EOAT
ESS deploys vacuum-style EOAT most often. In this design,
one or more vacuum cups with vacuum pumps are fitted to a base plate that
attaches to the robot. When air is applied, the pumps create a vacuum seal with
the cups, allowing the robot to lift whatever is attached to the vacuum cup.
This style is best for lifting objects and cases that have a smooth surface.
The wide range of vacuum cups available today handles everything from large
cases to individual products.
 |
| Just a Few of the Wide Range of Vacuum Cup Shapes and Sizes Available to EOAT Designers |
Gripper / Pincher EOAT
Gripper-style EOAT represents the next most designed style
that ESS sees. Also called pincher EOAT, pneumatically controlled grippers can
clamp around an object (or objects) and lift it. Objects with irregular shapes
or non-smooth surfaces can be handled more reliably with this type of EOAT.
Gripper EOAT is also ideal for applications where the robot must manipulate the
product, such as shaking a bottle. In case packing such products as foil
pouches, gripper EOAT can be fingered to grab products from a stacker.
 |
| Three-sided Grippers Allow Robot to Shake the Bottle without Dropping (left) Pinchers Firmly Grip Vials (right) |
 |
| Fingered Gripper EOAT Can Grab Foil Pouches, etc. From a Stacker |
Hybrid EOAT
ESS sometimes integrates vacuums with gripper EOAT to create
a more stable hybrid end effector for irregularly shaped packages. The vacuum
cups affix to the smooth parts of the irregular product while the grippers
prevent slippage.
 |
| EOAT with Vacuum Cups and Side Grippers Give Added Support When Case-Packing Bottles with Topserts (Portions of the EOAT have been masked to protect proprietary designs.) |
Platen EOAT
Platen end effectors also employ vacuum pumps, but rather
than using suction cups, the plate of the EOAT is punched with numerous holes.
A foam pad is then placed over the plate. When the vacuum pump is applied the
entire plate becomes a vacuum, allowing the robot to pick entire layers of
product at once.
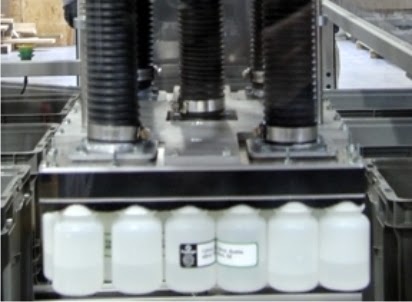 |
| Platen EOAT Picking a Layer of Bottles from a Tote |
Multi-Zone and Multi-Function EOAT
EOAT design has also advanced in terms of how much one end
effector can actually do. Multi-function EOAT allows a single robot end
effector to perform multiple tasks. For example, ESS’s CEL 5 Case Erector /
Loader incorporates an EOAT that uses a vacuum arm to pick and erect RSC cases
and move them across a bottom taper. The same EOAT then picks objects that have
been automatically collated at the infeed and places them in the same RSC case that
it just erected. The same EOAT also bumps the case out of the robotic cell to
an integrated top case closer or manual closing station.
 |
| One EOAT Erects the RSC Case (left) and Loads it (right) |
EOAT for Palletizers
Even palletizing end effectors can be designed for more than
one product or purpose. ESS designed a pallet cell end effector that allowed
the pharmaceutical manufacturer to palletize large bottles into crates, picking
three bottles at one time. ESS engineers programmed the same robot and end
effector to nudge the bottles into their correct position to allow room for
more bottles within the crate. Palletizer EOAT can be “multi-zoned” devices
that arrange the vacuum cups in such a way that multiple case sizes can be
handled with a single EOAT, reducing the cost for size parts and eliminating
lengthy changeover times.
 |
| Multi-zone Palletizing EOAT (left) and EOAT with “Nudge Blade” for Crating Bottles (right) (Portions of the EOAT have been masked to protect proprietary designs.) |
Advanced Design Tools
Software that allows 3D modeling of a robot end effector as
well as simulation design software allows designers to fully visualize a robot
end effector and test its functionality in a virtual environment. This allows
engineers to fully test the interoperation of vacuum and grippers in hybrid
EOAT as well as verify speed and product handling. By designing the EOAT in a
virtual environment first, engineers can reduce the R&D time required to
specify correct vacuum cup sizes and configurations, as well as vacuum pump
PSI, and other details.
 |
| Concept Case Erector / Loader EOAT (left) and Final EOAT (right) |
Conclusion
Today’s advanced EOAT design tools and components have
allowed EOAT designers to create ever more flexible, nimble and functional
robot end effectors. This increased functionality has allowed robotic
automation to expand into every part of the manufacturing and packaging
processes. The 2014 PMMI report concludes that:
For manufacturers, the future will be more robots –
working across the entire manufacturing process -performing repetitive tasks
and doing the heavy lifting in collaboration with human workers...Robots of the
future will move along the manufacturing line tirelessly improving throughput,
eliminating waste and reducing overall operational costs.
(PMMI. “2014 Trends in Robotics Market Assessment.” PMMI, Reston
Virginia: 2014, pp. 35-36.)
